






















Laser Sensors Guideline

- [Laser Obstacle Detection Sensor Module]
- [Laser Detection Sensor Module used as DIY 3D Scan Application]
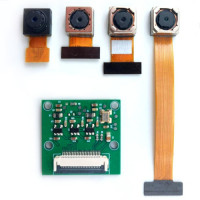
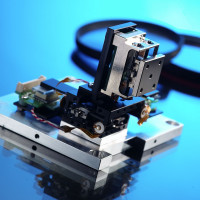
Laser Obstacle Detection Sensor Module
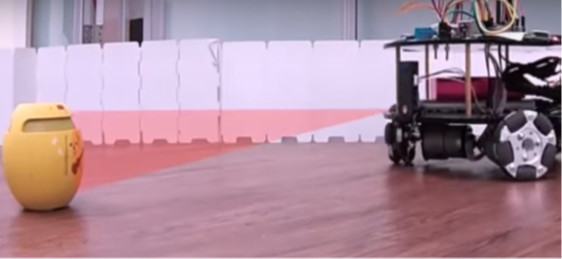

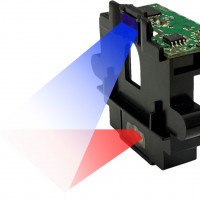
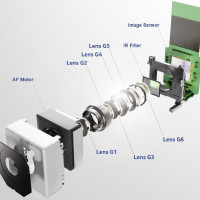
Thanks to the high performances of the DOE(Diffractive Optical Elements) that can transform a collimated laser beam into any specific pattern. We have designed a patented infrared laser module including a compact camera module. This laser obstacle sensor can detect the objects placed in front of it, calculate their shape and distance, which makes it perfect for integration in robotics, or autonomous moving vehicles to its obstacle dodging and laser mapping functions. The laser obstacle detection module integrates the laser line generator using our own designed DOE for linear uniformity of laser intensity and triangular image processing to simplify and increase the recognition for obstacle sensing in X-Z(Z:distance) plane.
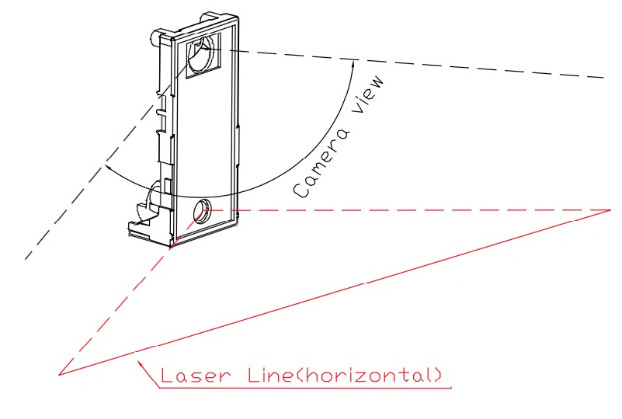
LOS1V110F30 laser obstacle detection sensor module can recognize the position including the distance, and form shape of obstacle in front. The wide view angle is designed to 110 degree FOV can be detected and transfer the data rate as 30 frames per second. It can be used for robot, vehicle, auto machine real time detection.
Laser Obstacle Sensor LOS1V110F30 Features:
* View Angle: 110o ~120o
* Range: From 5cm to 50cm
* Accuracy: Proportion to the distance, ±5%
* Camera Framw Rate: >10fps(up to 30fps)
* Scan Rate: 1620(30fps x 54 points)
* Data Rate: UART, 115,200 bps
* Laser Type: Class 1M, DOE Laser Line Module of IR Laser 808m or 940nm
— Datasheet Download: LOS1V110F30.pdfContact Us
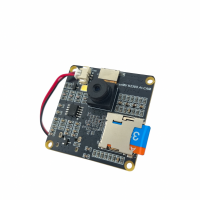
Laser Detection Sensor Module used as DIY 3D Scan Application
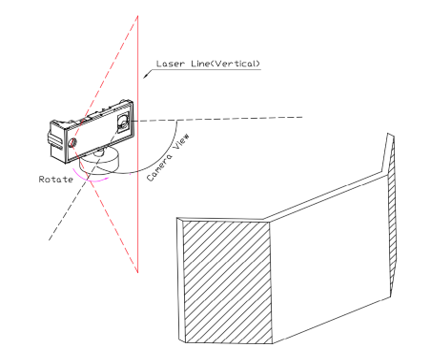
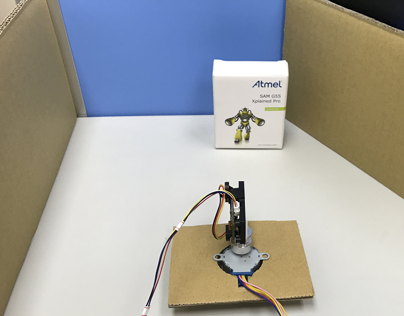
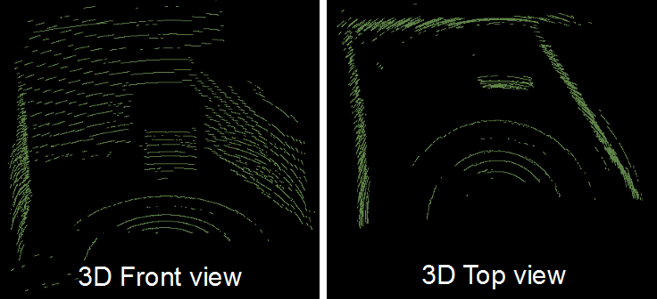
The DIY application: we use laser obstactle sensor LOS1V110F30 as laser line sensor installed to a rotation motor for the laser line scan. You can control the motor speed, sample points for the resolution you want. Then start the motor rotate the angle range you want to scan and translate the data from the laser sensor module. We can use the 3D drawing program to get the 3D drawing file. You also can use this laser line sensor module for many kinds image scan applications like surface scan, or rotate the objects for shap scan etc..
The relasted information please contact us.
Laser Sensor Solutions and Our Projects Demo
Leave a Comment