






















Remote Control Mobile Robot Platform

- [What is the Remote Control Mobile Robot Platform ?]
- [Raspberry pi 3 / ROS 2]
- [24V motor VS DC motor]
- [The future of IADIY's Remote Control Mobile Robot Platform]
Remote
Control Mobile Robot Platform
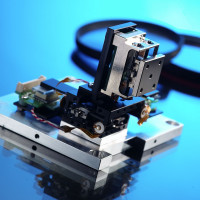
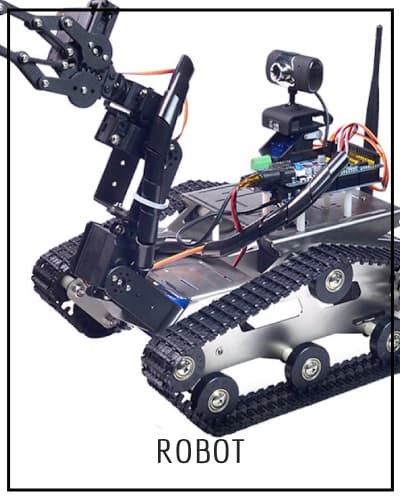
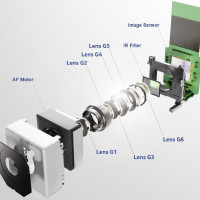
There’s a variety of measurements,
experiments and applications that you can do with photonic modules. But
to extent the breadth of usage of camera and laser modules, a mobile
platform is strongly recommended. As we march towards a generation of
robots and automation, the importance of mobile robot platforms cannot
be overemphasized. The mobile platform we have can carry heavier and a
larger amount of modules with the help of 24V brushless motor and the
50 x 25 sole plate we selected. The 24V motor has its built-in driver
and speed reduction gear, allowing the mobile platform to perform more
subtle actions.
We
selected a raspberry pi 3 / ROS2
We selected a raspberry pi 3 model to help us realize the mobile platform and designed our programs according to the pins that we connected. Using the ROS (robot operating system), we can access all kinds of libraries and modules to remote control the mobile platform on our laptops. There is more space for you to operate if you are looking for a more complex or custom coding design.
24V
motor VS DC motor
This
24V motor has quite a different property compare to regular DC motors.
We discovered that the negative port of the power supply should be
grounded so that the motor could operate. But once the negative port is
grounded, the PWM feature works in an opposite condition. Instead of
the behavior that the higher the duty cycle, the higher the rotation
speed, now the motor has lower speed when the duty cycle goes high.
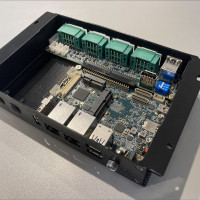
The black case on our mobile platform is the temporary battery we
selected to supply the power of our motors. It can supply DC 36V
because it’s mainly used on electric bicycles. Unfortunately, the
motors can only hold 24V so we inserted DC boost converter module for
both motors. We also mount a temporary mobile power bank for raspberry
pi on the platform.
The future of IADIY's Remote Control Mobile Robot Platform
Since
this is a prototype of our robot mobile platform, we haven’t designed
the wire traces and counterweight. You can see that some of the wires
are too long and that two terminal blocks and a temporary breadboard
are installed on the platform.
We are looking forward to reduce the space occupied by the batteries
and the boards to 20% of the current layout, expecting a more compact
mobile platform.
We establish the communication between the PC and raspberry pi via ROS
nodes, assigning the PC end to be the Master node in order to publish
the commands. In contrast, the raspberry pi end subscribes to the PC
end, receiving the commands.
 Compact Size AI Camera Module")
 Compact Size AI Camera Module")




")
")





-300x250h.png "i.MX8MP AI Vision Kit")
-300x250h.jpg "i.MX8MP AI Vision Kit")
































Leave a Comment